���飺�C����ʾ��ϵ�y(t��ng)��ԭ����������c ABBʾ�����S�ޣ�ᘌ��F(xi��n)�����I(y��)���ٶ�׃�Լ��������L�ď�(f��)�s��Ҫ���^�������졢Ӌ��C�������졢�������a(ch��n)�����й��̣��ڶ���δ�����I(y��)��(y��ng)�õ����a(ch��n)��Ԫ�У��C���˲��H��Ҫ��֪ƣ����M�к����؏�(f��)����.����������һ���߶����ԡ���
����
�����C����ʾ��ϵ�y(t��ng)��ԭ����������c
����
ABBʾ�����S����ᘌ��F(xi��n)�����I(y��)���ٶ�׃�Լ��������L�ď�(f��)�s��Ҫ���^�������졢Ӌ��C�������졢�������a(ch��n)�����й��̣��ڶ���δ�����I(y��)��(y��ng)�õ����a(ch��n)��Ԫ�У��C���˲��H��Ҫ��“��֪ƣ��”���M�к����؏�(f��)����.����������һ���߶����ԡ��_�Ų������Ѻõ��˙C�������ܵĿɾ��̡���צ��(g��u)�����Ԫ�ںϵ�����I(y��)ϵ�y(t��ng)�У��@һ�����Č��F(xi��n)Ҫ��F(xi��n)�A�ΙC���˼��g(sh��)�w���M��.ʾ�̼��g(sh��)��������צҪ��һ헡��C��������ܱ�������ɲ�ͬ���΄�(w��)����ҕ�����Ե��Ԅӻ��O(sh��)��“��ͨ�^ijһ�O(sh��)���ʽ���F(xi��n)���C�������I(y��)�΄�(w��)�ľ��̣��@���^�̾��ǙC���˵�ʾ���^�̡�
�����F(xi��n)�еęC����ʾ��ϵ�y(t��ng)���Է֞��������
����(1)ʾ���٬F(xi��n)��ʽ
�����V�����J
ABB�C������ABBʾ���٬F(xi��n)(t eaching pla��ack)��Ҳ�Q��ֱ��ʾ�̣�����ָ�҂�ͨ�����f���ְ���ʾ�̣�����ֱ�Ӱ�әC���˵��ֱی��C�����M��ʾ�̣���ʾ�̺�ʾ�̻�����Uʾ�̵ȡ����@�Nʾ���У�����ʾ�̷����Լ��@ȡ��Ϣ�Ŀ�ݶ���(zh��n)�_�������߿����x���ڲ�ͬ����(bi��o)ϵ��ʾ�̣����磬�����x�����P(gu��n)��(ji��)����(bi��o)ϵ(Joint Coordinates)��ֱ������(bi��o)ϵ(Reetan:ular Coordinate:)�Լ���jë����(bi��o)ϵ(Tool Coordinates)���Ñ�����(bi��o)ϵ(User Coordinates)���M��ʾ�̡�
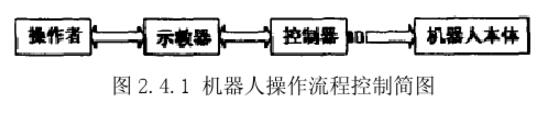
����ABB�C����ʾ���٬F(xi��n)�ǙC�����ձ���õľ��̷�ʽ.���͵�ʾ���^�������������T�^��C���˼���A�ֹ������������I(y��)�����λ�ˣ�ͨ�^��ʾ�̺еIJ���������(f��)�{(di��o)��ʾ���c̎�C���˵����I(y��)λ�ˡ��\�Ӆ���(sh��)��ˇ����(sh��)��Ȼ�M�����I(y��)Ҫ����@Щ��(sh��)��(j��)ӛ��������D(zhu��n)����һ�c��ʾ�̡�
������ʾ���^�̽Y(ji��)���C���ˌ��H�\�Еrʹ���@Щ��ӛ䛵Ĕ�(sh��)��(j��)����(j��ng)�^���a�\�㣬�Ϳ����٬F(xi��n)��ʾ���c��ӛ䛵ęC����λ�á�
�����@�����ܵ��Ñ���‘����ʾ�����I�P�������Cͨ�^ͨ�^����ʾ������������Ӌ��C�l(f��)�Ϳ�������ٿv����Ӌ��C�ϵ�ܛ������Ɍ��C���˵Ŀ���:���ʾ���������յ��Į�(d��ng)ǰ�C�����\�Ӻ͠�B(t��i)����Ϣͨ�^Һ��l��������@ʾ��ʾ����ͨ�^���|�c����Ӌ��C���B��
�������@�Nʾ�̷�ʽ�У�ʾ�̱���һ����Ҫ�ľ����O(sh��)�䣬һ��߂�ֱ�����A�����P(gu��n)��(ji��)���a�Լ��܉�քe���P(gu��n)��(ji��)���g�͵ѿ������g���F(xi��n)���C���˵Ŀ��Ƶȹ��ܡ�
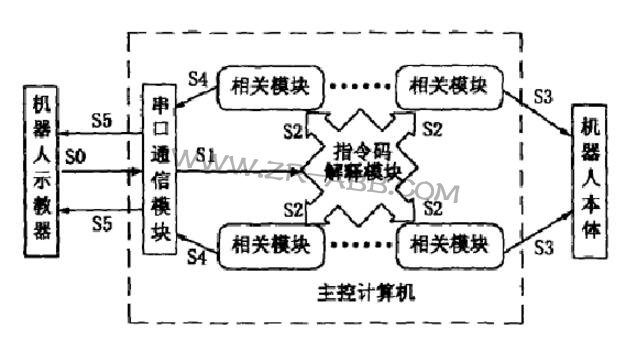
����ʾ�̕r����(d��ng)�Ñ�����ʾ���I�P�ϵİ��I�r��ʾ����ͨ�^���|������Ӌ��C�l(f��)������(y��ng)��ָ����a(S0):�˕r������Ӌ��C�ϵ�����ģ�K��ؓ؟(z��)����ͨ�ŵ�ͨ����ģ�K�еĴ��ձO(ji��n)ҕ���̽���ָ����a(51):Ȼ����ָ��a���ģ�K�����Д�ԓָ��a�����Mһ�������P(gu��n)У�K�l(f��)���cָ��a����(y��ng)����Ϣ(S2);�S�����P(gu��n)У�K���ԓָ��aҪ��ľ��w����(S3)��ͬ�r.���������Ñ�l�������ՙC���˵��\��λ�ú��N��B(t��i)��Ϣ.����Ӌ��C�����P(gu��n)У�Kͬ�r����B(t��i)��Ϣ(S4)�Ĵ��ڰl(f��)�ͽoʾ����(S5)����Һ���@ʾ�����@ʾ���Ķ��c�Ñ���ͨ.��ɔ�(sh��)��(j��)�Ľ��Q���ܡ�
���������ڵ�ʾ���٬F(xi��n)ϵ�y(t��ng)�У�߀��һ�N�˹�����ʾ�̡�2��һ���Dz����Tֱ�Ӡ����C���������I(y��)·���\��һ�飬�����y��ֱ�Ӡ����Ĵ�������Һ���C���ˣ��@�N��ʽ�������m���������˹�ģ�M����ʾ�̣��ڠ������^���У���Ӌ��C���C���˸��P(gu��n)��(ji��)�\�Ӕ�(sh��)��(j��)�ɘ�ӛ�.�õ����I(y��)·����(sh��)��(j��).�����@Щ��(sh��)��(j��)�Ǹ��P(gu��n)��(ji��)�Ĕ�(sh��)��(j��).����@�N�����ֱ��Q���P(gu��n)��(ji��)����(bi��o)ʾ�̷�.�@�Nʾ�̷����ă�(y��u)�c�ǿ��ƺ��Σ�ȱ�c�DŽڄӏ����ˣ����������Ը�.���Ȳ��ױ��C��
�������ʾ��ʧ�`������·����Ψһ�������Ǹ���ʾ�̡�
���������˙C���ˎ����^�ߵ��؏�(f��)��λ���ȃ�(y��u)�c.������ϵ�y(t��ng)�`��C�����\�ӽ^�����ȵ�Ӱ푣��@Ҳ��Ŀǰ�C�����ձ�����@�Nʾ�̷�ʽ����Ҫԭ��
����Ҫ������Tֻ���ஔ(d��ng)?sh��)Č��I(y��)֪�R���쾚�IJ������ܣ�����Ҫ�F(xi��n)�������xʾ�̲������������һ����Σ�U�ԣ���ȫ���^��
����ʾ���^�̷������M�r����Ҫ����(j��)���I(y��)�΄�(w��)����(f��)�{(di��o)���C���˵Ą���܉�E�ˑB(t��i)�cλ��.�rЧ���^�
����(2)�x�����̷�ʽ
��������CAD/CAM�ęC�����x������ʾ��.������Ӌ��C�D�ΌW(xu��)�ij�Ⱦ��������C���˼��乤���h(hu��n)����ģ�ͣ�ʹ��ij�N�C���˾����Z�ԣ�ͨ�^���D�εIJ����Ϳ��ƣ��x��Ӌ���Ҏ(gu��)�����C���˵����I(y��)܉�E.Ȼ���̵ĽY(ji��)���M�����S�D�η��棬�ԙz�̵����_�ԡ�6]������ڴ_�J�o�`��.���əC���˿Ɉ�(zh��)�д��a���d���C���˿������У����Կ��ƙC�������I(y��)������(j��)ʹ�þ����Z�ԵČӴβ�ͬ���x�������ֿɷ֞��(zh��)�м����̺��΄�(w��)�����̡�7]��
����(3)����̓�M�F(xi��n)����ʽ
�����S��Ӌ��C�W(xu��)�����P(gu��n)�W(xu��)�Ƶİl(f��)չ���e�ǙC�����b������̓�M�F(xi��n)������������Ϣ̎���ȼ��g(sh��)���M�����(zh��n)�_����ȫ����Ч�ęC����ʾ���ṩ���µ�˼·�����Ñ��ṩһ�N���º��C���˙C���������h(hu��n)����̓�M�F(xi��n)�����g(sh��)(Virtual Reality��VR)���F(xi��n)�͑�(y��ng)����������T�����C�����c�Ԅӻ��I(l��ng)��ČW(xu��)�ߵ�ע�⡾9]���@�̓�M�F(xi��n)������߶˵��˙C��rl.���S�Ñ�ͨ�^�������Լ��D�εȶ�N�����O(sh��)�䌍�r���c̓�M�h(hu��n)������������(j��)�Ñ���ָ�]�������ʾ��ʾ�̻�O(ji��n)�ؙC�����M�Џ�(f��)�s�����I(y��)��101������̓�M�F(xi��n)�����g(sh��)�M�ЙC����ʾ���ǙC���ˌW(xu��)�����d���о�����
����Դ��
���I(y��)�C���˾S���پW(w��ng)��m.qhdjznet.com

 �C�����YӍ
�C�����YӍ 80%��I(y��)���R���]�����I(y��)�C���ˮa(ch��n)�܇�(y��n)���^ʣ
80%��I(y��)���R���]�����I(y��)�C���ˮa(ch��n)�܇�(y��n)���^ʣ
 ��� > ABBʾ�����S�� >
��� > ABBʾ�����S�� >