簡介:ABB S4Cplus機器人硬件系統及常見故障分析.分析該機器人在工作時的典型故障及產生原圈.并提出排除故障的方法。排除硬件故障后再檢查系統軟件.全方面排除機器人故障,這樣就會大大縮短故障排除的時間.為生產線的正常生產提供保障。 1、ABB S4Cplus機器人硬件……
ABB S4Cplus機器人硬件系統及常見故障分析.分析該機器人在工作時的典型故障及產生原圈.并提出排除故障的方法。排除硬件故障后再檢查系統軟件.全方面排除機器人故障,這樣就會大大縮短故障排除的時間.為生產線的正常生產提供保障。
1、ABB S4Cplus機器人硬件系統
1.機器人本體。機器人本體是由六個轉軸組成的機構,每個轉軸都帶有一個西門子生產的交流伺服電機。同時電機自帶的編碼器反饋信號給驅動器.驅動器根據反饋值與目標值進行比較.調整轉動的角度,機器人運動精度達到±0.05mm—±0.2mm。編碼器與串口測量板(SMB璉接,每個交流伺服電機都有單獨的供電和編碼器側量線路。串口測量板主要起接收六個軸編碼器位置參數的作用。并通過串口側量板與控制柜計算機系統通信.調整機器人運行。
1.2控制拒組成,
ABB驅動模塊維修,機器人控制柜由機器人直流供電系統.輸入輸出系統.安全系統.計算機控制系統,伺服驅動系統等.散熱冷卻系統組成
1.21機器人直流供電系統。機器人直流供電單元一DSQC506將輸人220V交流電轉換為輸出24V, 15V直流電,為機器人驅動系統L/O板單元,安全板、串口測量板等設備供電;計算機直流供電單元DSQCSOS將24V直流電轉換為相應5V,33V,12V直流電.為機器人內部計算機系統提供電源。主計算機通過系統監控總線SMBus.監控所有直流輸出;電池組單元_DSQC508由控制卡.電池組.測量電阻三部分組成。控制卡是電池微處理管理板。
電池組是由帶溫度傳感器的可充電鑲格電他組成輸入24V直流.輸出21.6V直流.當機器人關關機輸入交流電壓小于180V時.并超過20m.,電池組開始放電.為機器人系統備份提供電力。機器人通過溫度檢測控制充電狀戀.并每周一次通過側試電阻放電自檢電池狀態。主計算機通過系統監控總線監控電池組電力、充電狀戀、電池功能與電池狀態
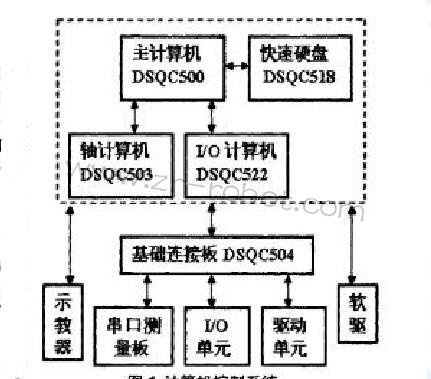
1.22計算機控制系統。機器人計算機系統如圖所示.由主計算機板DSQC500.軸什算機板DSQC503.L/O計算機板DSQC522.底板DSQC501.快速硬盤DSQC518.計算機直流供電單元DSQC505、電池組單元DSQC5O8.冷卻風扇等組成。主計算機.軸計算機..L/O計算機通過底板連接.快速硬盤安裝在主計算機板上。計算機系統支持1-2塊1/0計算機板和1-3塊軸計算機板。每塊軸計算機板最多控制7個軸調整各軸的速率和轉矩,軸計算機從主計算機接收數據.從串口測量板接收當前位置信號,計算機使用這些數據計算調整后愉出位置信號至驅動系統。當計算機系統工作時通過外部基礎連接板DSQC504與驅動系統通信.輸出運用指令,驅動驅動器運行.并接收串口測量板反饋信號.計算機器人運動位置,.并發出下一指令。1.23伺服驅動系統,伺服驅動系統由計算機系統控制,對位置、速度和電機電流進行數字化調整。對電機的交流控制進行司步。機器人通過計算機系統發出運動指令,控制驅動器使機器人運動,并從串口測量板連續地接收機器器人新的位置數據。輸入位置調整器中,與先前的位置數據進行比較和放大,輸出新的位置和速度控制參數。同時系統會根據重力、運動時的轉動慣量和軸之伺的相互作用,不斷地計算和優化調整參數。ABB驅動模塊維修,驅動單元由驅動供電單〔DC. LINK)和三個驅動器組成。每個驅動器控制2個軸的交流伺服電機:1、6軸,2、4軸,3、5軸各共用一個驅動器。
1.24安全系統,機器人安全系統是基于安全控制的雙電子安全鏈。每一條電子安全鏈都是由若干個開關串聯組成的運行鏈,機器人只有在所有開關都閉合的情況下,才能使機器人設置MOTOR ON模式,機器人只有在MOTORON狀態下才能給伺服電機上電。如果安全鏈一旦斷開,機器人就轉換成MOTOR OFF模式.機器人何服電機掉電.只有復位停止信號機器人才能再次上電。安全面板DSQC509的主要功能是監控雙電子安全鏈.各開關狀態都顯示在安全面板DSQCSO9的LED指示燈和示教器的顯示器上,觀察這些狀態就可以判斷出停止信號的來源。控制面板還監控伺服電機過熱保護PTC溫控電阻和變壓器過熱保護,驅動器單元的冷卻風扇和封算機系統的冷卻風扇,只要這些裝置有信號.愉入.電子安全鏈立即斷開,機器人停止運行。1.25愉入輸出系統。輸入愉出系統由L/O板單元組成,機器人系統最多支持4塊L/O板單元。每塊L/O板有16個輸入點和16個輸出點。L/O單元板使用數字和模擬輸入輸出信號與外部其它設備通訊。L/O板單元通過CANBus總線和計算機系,統連接,通過一對一導線與外部設備PLC通訊。
焊接機器人輸入輸出系統通過外部PLC與焊接設備通訊。機器人的移動焊接〔作過程:機器人移動到焊接工作點位置,控制系統由輸入輸出系統通過外部PLC向焊接控制箱發出啟動焊接倍號.焊接控制箱發出信號焊槍閉合焊接開始.焊接結束控制箱發出焊接完了信號,打開焊槍,機器人接收焊接完了信號和焊槍打開到位信號后發出移功信號,機器人移動到下一焊接工作點位置。
2、機器人常見故障分析
03報警是焊接機器人焊接變壓器過熱報警,在焊接變壓器七有一個溫度過熱保護,保護信號通過L/O系統與機器人通訊.受安全面板監控.當這個過熱保護損壞或連接導線斷路均可以造成此故障;04報警是焊接機器人焊接異常報警。機器人發出焊接啟動信號給焊接控制箱.焊接控制箱發出焊槍閉合和焊接開始信號,焊接完成后返回焊接完了信號給機器人。當機器人接收不到焊接完了信號時04報警。造成這一故障的原因可能有:焊槍沒有合。沒有完成焊接過程;電極頭短,沒有完成焊接過程.焊接部件表面有異物影響焊接過程.焊接電纜斷。沒有完成焊接,機器人投有接收到焊接完了信號。
05報警是由于機器人在焊接移動過程中遇到外界阻力.機器人系統有過載監控保護,當達到監控級別的阻力時系統報警01、02報警是機器人監控安全鏈上的示教器急停.面板急停.安全門急停開關斷開.雙安全鏈斷開.機器人MOTOROFF仲州膠警。GUN TIME-OUT是機器入焊接結點后,焊槍打開到位開關檢測后.機器人才能夠繼續移動,否則機器人就會認為焊槍沒有打開而報警,不再堆續移動T作。檢測開關一般都是焊槍小張口開關。原因可能有:檢側開關損壞,開關線路斷路。但有的時候機器人也可以取消檢測功能.在焊槍捍接完了后,焊槍打開的時機器人就可以移動,這時可以夏修改焊槍打開時間參數來控制焊接和移動過程。
文章來源,
工業機器人維修官網:m.qhdjznet.com


 首頁 > ABB驅動模塊維修 >
首頁 > ABB驅動模塊維修 > 


