簡介:巡邏艇制造對焊接工藝要求嚴苛,船體、甲板、艙室等部位多采用高強度合金鋼材,焊縫需具備足夠結構強度與耐海水腐蝕性,ABB機器人憑借穩定的軌跡控制與參數輸出能力,成為這類復雜焊接作業的主力設備。……
巡邏艇制造對焊接工藝要求嚴苛,船體、甲板、艙室等部位多采用高強度合金鋼材,焊縫需具備足夠結構強度與耐海水腐蝕性,
ABB機器人憑借穩定的軌跡控制與參數輸出能力,成為這類復雜焊接作業的主力設備。保護氣作為核心耗材,供給狀態直接影響熔池穩定性與焊縫缺陷發生率,傳統固定流量模式已無法匹配巡邏艇焊接的動態參數變化需求。
WGFACS節氣裝置是適配ABB機器人巡邏艇焊接場景的保護氣智能調控設備,能依托自身自適應控制邏輯,與ABB機器人形成精準協同,在保障焊縫質量達標基礎上,降低40%-60%的保護氣消耗。
巡邏艇焊接的動態特性,讓傳統供氣模式的局限持續顯現。船體不同部位的焊接參數差異明顯,甲板厚板焊接需提升電流以保證熔深,此時對保護氣的需求量同步增加,需足量氣體形成致密氣幕隔絕空氣與海水濕氣。艙室薄壁構件焊接時電流下調,熔池體積隨之收縮,固定流量供給的保護氣會形成過量渦流,不僅造成氣體浪費,還可能卷入空氣導致焊縫邊緣氧化、氣孔等問題。變姿態作業在巡邏艇焊接中占比極高,ABB機器人調整焊槍角度、位移銜接不同焊縫時,傳統供氣設備仍維持滿流量輸出,大量氣體未參與熔池保護即直接排空。
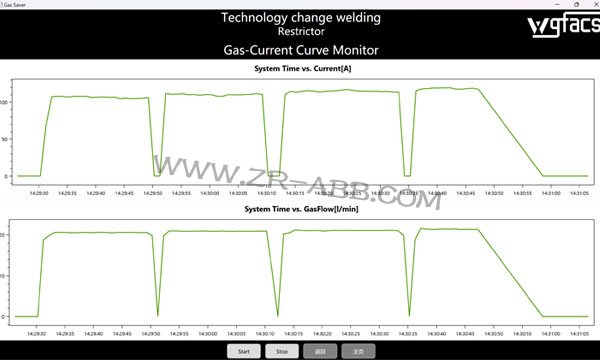
WGFACS節氣裝置的核心優勢在于實現保護氣按需供給,精準契合ABB機器人巡邏艇焊接的動態工況。裝置可接入ABB機器人控制系統,無需對機器人本體結構、焊接程序進行大幅改造,可實時捕獲焊接電流、起弧收弧信號及焊槍姿態數據,數據傳輸延遲控制在毫秒級,確保供氣調整與焊接狀態無縫同步。整套系統嚴格遵循電流大則多,電流小則少的調節原則,根據ABB機器人輸出電流的實時波動,自動適配保護氣流量,讓供給量始終貼合當前熔池保護的實際需求。
WGFACS節氣裝置針對巡邏艇焊接場景,內置了多維度適配策略。起弧瞬間,ABB機器人電流驟升,裝置會快速觸發瞬時增流模式,在極短時間內將保護氣流量提升至預設值,清除焊槍噴嘴內殘留空氣與濕氣,避免起弧階段因保護不及時出現的焊縫缺陷。焊接過程中,裝置通過高精度電流傳感器持續監測參數變化,厚板焊接時電流升高,流量按比例同步提升,確保擴大后的熔池完全被氣體覆蓋;薄壁件焊接時電流降低,流量隨之精準下調,僅維持滿足保護需求的最小流量,避免氣流沖擊熔池影響成型。
面對巡邏艇船體曲面、轉角等復雜部位的變姿態焊接,WGFACS節氣裝置能結合焊槍姿態數據微調流量。焊槍傾斜角度過大時,氣體分布易出現不均,裝置可針對性提升少量流量,彌補重力作用導致的氣體流失,確保熔池保護效果一致。收弧階段,裝置不會立即切斷供氣,而是啟動梯度緩降程序,流量逐步降低,直至熔池完全凝固后再停止供氣,避免收弧部位因保護不足出現縮孔、裂紋,保障焊縫密封性與結構強度,契合巡邏艇航行的安全需求。
WGFACS節氣裝置與ABB機器人的協同安裝調校,需貼合巡邏艇焊接工藝特點細化操作。安裝初期先完成基礎對接,將裝置與ABB機器人的電流檢測端子、氣體管路精準連接,對接處采用專用密封件加固,仔細檢查密封性,避免氣體泄漏影響調控效果。隨后根據巡邏艇常用鋼材材質、板厚規格,設定不同電流區間對應的流量基準值,建立專屬的電流-流量聯動曲線,確保參數適配性。
選取巡邏艇船體縱縫、艙室對接縫等典型部位進行試焊,通過
ABB機器人示教器觀察焊接過程中的熔池狀態,焊后檢查焊縫外觀與截面質量。若焊縫表面出現氧化變色、氣孔等問題,說明對應電流區間流量不足,適當上調該區間的供給比例;若焊縫余高過大、邊緣出現氣泡,可能是流量過量導致熔池冷卻過快,下調對應參數直至適配。參數確定后存儲至裝置內置模塊,切換焊接部位時可直接調用,無需重復調試。
巡邏艇焊接的間斷性作業特性,更能凸顯WGFACS節氣裝置的節能效能。ABB機器人在更換工件、清理焊槍、調整工位等非焊接時段,裝置會自動切換至待機模式,將保護氣流量降至僅能維持噴嘴正壓的水平,既防止空氣倒灌污染焊槍,又徹底杜絕無效消耗。實際應用數據顯示,搭載該裝置后,保護氣消耗可降低40%至60%,高頻間斷焊接場景的節氣效果更為顯著,且不會影響焊接質量。
WGFACS節氣裝置為ABB機器人巡邏艇焊接提供了精準的保護氣管控方案,通過電流與流量的動態聯動,打破傳統固定流量供氣的局限。它無需復雜改造即可適配現有設備,操作便捷且工況適應性強,既能為巡邏艇制造企業降低保護氣采購成本,又能通過穩定供氣提升焊接工藝一致性。在船舶制造追求精益生產與綠色節能的趨勢下,這類智能節氣方案正成為巡邏艇焊接場景的優化選擇,讓保護氣使用更高效、更貼合實際作業需求。
文章來源,
工業機器人維修官網:m.qhdjznet.com


 首頁 > 銷售中心 > 節氣裝置 >
首頁 > 銷售中心 > 節氣裝置 >