�����Ŏ�����Q�C���˹���

 ��� > ABBʾ�����S�� >
��� > ABBʾ�����S�� > 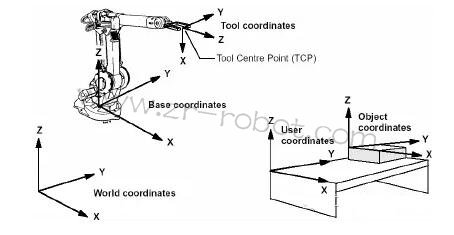
|
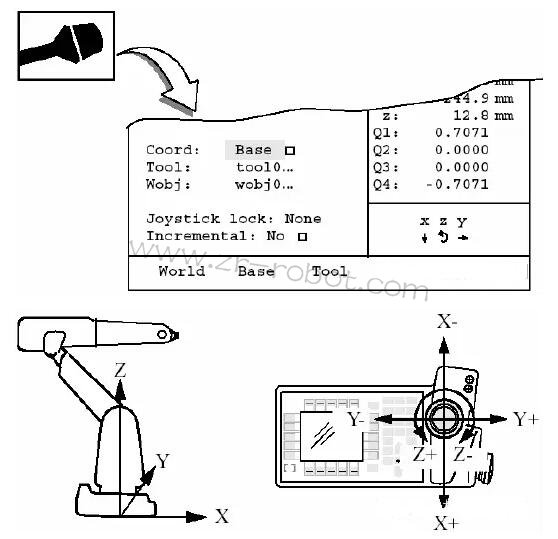
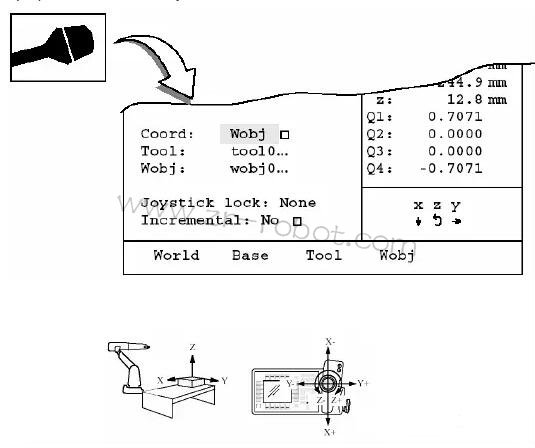
Worldcoordinates |
�������ϵ |
|
|
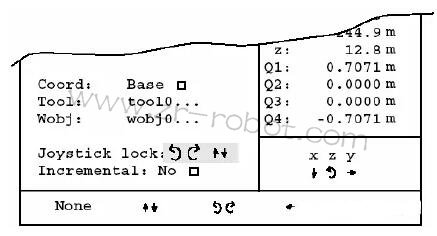
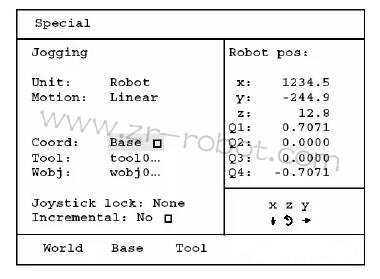
Basecoordinates |
���A����ϵ |
|
|
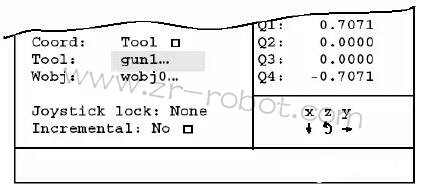
Toolcoordinates |
��������ϵ |
|
|
Workobjectcoordinates |
��������ϵ |
|
��2������ϵ�x��