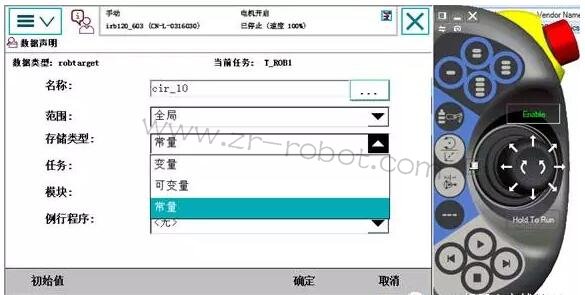
���飺ABB�C(j��)���˔�(sh��)��(j��)�惦��ͅ^(q��)�e CONST VAR PERS �^(q��)�e 1��ABB�C(j��)�����κΔ�(sh��)��(j��)���д惦��ͣ��֞鳣��CONST��׃��VAR�Ϳ�׃�� 2������CONST���������(n��i)�����xֵ 3��׃���Ϳ�׃���������xֵ���^(q��)�e���� ׃��-�г�ֵ�ͮ�(d��ng)ǰֵ���ڈ�(zh��)�д��_�����Ƅ�ָᘵ�main���Ƅ�ָ����
����׃��-�г�ֵ�ͮ�(d��ng)ǰֵ���ڈ�(zh��)�д��_�����Ƅ�ָᘵ�main���Ƅ�ָᘵ�routine�r��׃���Į�(d��ng)ǰֵ������ʼ������ֵ׃?y��u)���?/div>
������׃����ֻ�Ю�(d��ng)ǰֵ�����κΕr�������ģ���ֵ�����ˡ��ڈ�(zh��)�д��_�����Ƅ�ָᘵ�main���Ƅ�ָᘵ�routine�r��ֵ���Ǯ�(d��ng)ǰֵ�������l(f��)��׃��
����4��Ĭ�J(r��n)�����robtarget�Ĵ惦�����const�����������˕r�o���xֵ�����D����ʹ����x��robtarget߀�Dz��@ʾ�ѽ�(j��ng)������robtarget��
�����˕r��������(sh��)��(j��)���ҵ��@����(sh��)��(j��)����-�����������Ğ�׃���xֵ�Z��r�������ҵ��@���c(di��n)λ�ˡ�
������(chu��ng)��������(sh��)�����
����1��ʲô�Dž���(sh��)���г���

�������г������ݔ��?y��n)��?sh��)��ʹ�õĕr�����������Զ��xָ��
����2����ʲô�ã�
��������ʹ�ã��Ñ������P(gu��n)�ă�(n��i)����(sh��)�F(xi��n)�^��
����3����΄�(chu��ng)��

����1���½����г���
����2���O(sh��)�����Q���c(di��n)��(sh��)���O(sh��)��ݔ��?y��n)��?sh��)
����3�����Ӆ���(sh��)��ע����߅�Ĕ�(sh��)��(j��)��ͼ���ԓ����(sh��)��(sh��)��(j��)��ͣ���̎�e��ݔ���2��
����4���c(di��n)���_����
����5�������(n��i)������(j��)�Լ���Ҫ���Ӄ�(n��i)��
����6��������(sh��)���г�����ֱ��ʹ�ã���������{(di��o)�ã���ݔ��?y��n)��?sh��)������
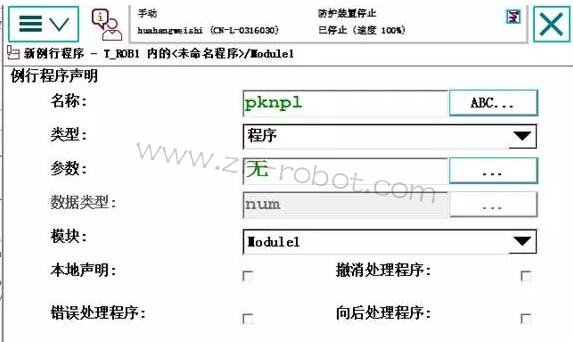
������pknplָ��Ą�(chu��ng)������(sh��)�F(xi��n)���ܞ��pHomeλ����ȡ����Target_10λ�÷���
PROCRoutine2()
pknpl pHome,Target_10;
ENDPROC
PROCpknpl(robtarget pick_pos,robtarget place_pos)
MoveJoffs(pick_pos,0,0,30),v500,z1,tool0;
MoveL pick_pos,v500,fine,tool0;
Set do1;
MoveLoffs(pick_pos,0,0,30),v500,z1,tool0;
MoveJoffs(place_pos,0,0,30),v500,z1,tool0;
MoveL place_pos,v500,fine,tool0;
ReSet do1;
MoveL offs(place_pos,0,0,30),v500,z1,tool0;
����Դ��
���I(y��)�C(j��)���˾S���پW(w��ng)��m.qhdjznet.com

 �C(j��)�����YӍ
�C(j��)�����YӍ 80%��I(y��)���R���]�����I(y��)�C(j��)���ˮa(ch��n)�܇�(y��n)���^ʣ
80%��I(y��)���R���]�����I(y��)�C(j��)���ˮa(ch��n)�܇�(y��n)���^ʣ
 ��� > ABB�C(j��)���˾S�� > ABB�C(j��)���˱��B(y��ng) >
��� > ABB�C(j��)���˾S�� > ABB�C(j��)���˱��B(y��ng) >