簡介:編程與測試 1、程序的組成: 應用程序是由三個不同部分組成: 1. 一個主程序。 2. 幾個子程序(例行程序)。 3. 程序數據。 除此之外,程序儲存器還包括系統模塊。USER模塊與BASE模塊在機器人冷啟動后自動生成。 編程窗口: 1. File Open 打開一個現有文件。……
編程與測試
1、程序的組成:
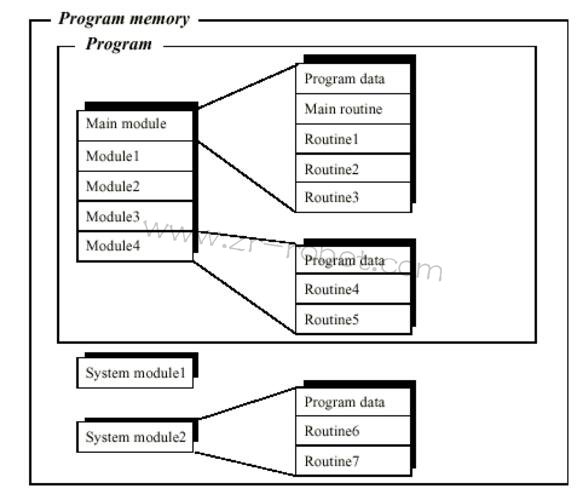
應用程序是由三個不同部分組成:
1. 一個主程序。
2. 幾個子程序(例行程序)。
3. 程序數據。
除此之外,程序儲存器還包括系統模塊。USER模塊與BASE模塊在機器人冷啟動后自動生成。
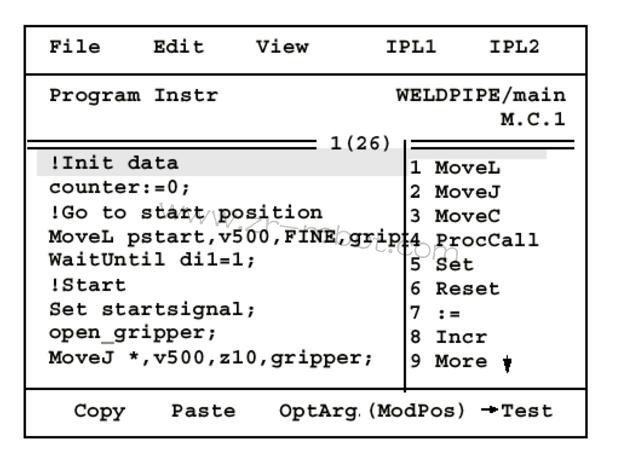
編程窗口:
1. File
Open 打開一個現有文件。
New 新建一個程序。
Save program 存儲更改后的現有程序。
Save program as 存儲一個新程序。
Print 打印程序。
Prefence 定義用戶化指令集。
Check program 檢驗程序。光標會提示。
Close 在工作內存中關閉程序。
Save moduel 存儲更改后的現有模塊。在Moduel窗口)
Save moduel as 存儲一個新模塊。(在Moduel窗口)
打開一個現有文件: 編程窗口/File/Open/回車/選擇文件/OK/進入指令編輯窗口。
新建一個程序:
編程窗口/File/New/回車/進入文件編輯窗口,輸入文件名/OK/進入指令編輯窗口。
Edit
Cut 剪切。注意可能丟失指令。
Copy 復制。
Paste 粘貼,將剪切或復制的指令粘貼。
Go to top 將光標移至頂端。
Go to buttom 將光標移至末端。
Mark 定義一塊,涂黑部分。
Change selocted修改指令。可直接選到位打回車。
Show value 輸入數據。可直接選到位打回車。
Modpos 修改機器人位置。功能鍵上有。
Search ...... 尋找指令,程序復雜時很有用。
功能鍵:
Copy、Paste、Modpos 在Edit中可以找到。
Test 為編程與測試切換鍵。
IPLhide分為IPL1與IPL2。
IPL1為指令目錄。
IPL2中有Most commt1、Most commt2、
Most commt3為用戶化定義指令,在File Preference中定義。
基本運動指令:
MoveL p1,v100,z10,tool1;
Move L: 線性運動。(Linear)
Move J:關節軸運動。(Joint)
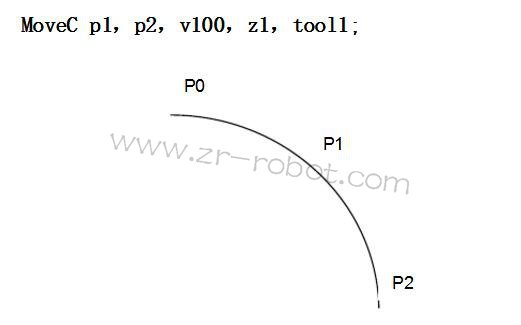
Move C:圓周運動。(Circular)
p1: 目標位置。
v100: 規定在數據中的速度。
z10: 規定在轉彎區尺寸。
tool1: 工具。(TCP)
在光標指在此指令時,打回車,再按OptArg鍵,可選擇參變量。
〔 \ Conc 〕
協作運動。機器人未移動至目標點,已經開始執行下一個指令。
〔To Point〕
在采用新指令時,目標點自動生成*。
〔\V〕
定義速度mm/s。
〔\T〕
定義時間s。不管速度只考慮時間。
〔\Z〕
定義轉彎區尺寸mm。
〔\Wobj〕
采用工件系坐標系統。
速度選擇:mm/s
將光標移至速度數據處,回車,進入窗口。選擇所需速度.
vmax速度為v5000,可自定義速度。
最大可定義至v7000,但機器人未必能達到。
轉彎區尺寸選擇:mm
將光標移至轉彎區尺寸數據處,回車,進入窗口。
選擇所需轉彎區尺寸,可自定義。
fine指機器人TCP達到目標點,在目標點速度降為零。機器人動作有停頓,焊接時必須用。
zone指機器人TCP不達到目標點,機器人動作圓滑、流暢。
為了精確確定p1、p2、p3、p4點,可以采用函數offs,反饋一個參變量。
offs(p,x,y,z)代表一個離p1點X軸偏差量為x,Y軸偏差量為y,Z軸偏差量為z的點。
將光標移至目標點,回車,選擇Func,采用切換鍵選擇所用函數。
MoveC p1,p2,v100,z1,tool1;
畫一個半徑為80mm的圓:

MoveJ p0,v500,z1,tool1; MoveL offs(p,80,0,0),v500,z1,tool1; MoveC offs(p,0,80,0),offs(p,-80,0,0),v500,z1,tool1; MoveC offs(p,0,-80,0),offs(p,80,0,0),v500,z1,tool1; MoveJ p0,v500,z1,tool1;
輸入輸出群指令:
do指機器人輸出信號。
di指輸入機器人信號。
輸入輸出信號有兩種狀態,1為接通,0為斷開。
Set do1; 將一個輸出信號賦值為1。
Reset do1; 將一個輸出信號賦值為0。
Wait DI di1/maxtime:=5/Timeflag:=flag1;
等待輸入信號Di1值為1,等待時間為5秒,5秒內得到相應信號則執行下一句指令,并將flag1置為flase。 超過5秒未得到相應信號則將flag1置為ture,不執行下面的指令,并顯示相應信息。
最大等待時間單位為秒,最大等待時間為五分鐘。
Wait Until di=1;
等待一個輸入信號值為1,才執行下一行指令
通信指令(人機對話):
TP ERASE; 清屏指令。
TP WRITE 書寫指令。
TP WRITE “ ABB ”; 顯示ABB。
TP WRITE ABB; 顯示所賦于ABB的值。
TP Read num “reg1”;
在示教板上賦予機器人變量數據。
Wait Time 3;
等待一斷時間,再執行下一行指令。時間單位為秒。
通信指令(人機對話):
TP ERASE; 清屏指令。
TP WRITE 書寫指令。
TP WRITE “ ABB ”; 顯示ABB。
TP WRITE ABB; 顯示所賦于ABB的值。
TP Read num “reg1”; 在示教板上賦予機器人變量數據。
Wait Time 3;
等待一斷時間,再執行下一行指令。時間單位為秒。
程序流程指令:
IF 判斷執行指令。
IF < exp > THEN 符合<exp>條件,
“ Yes-part ” 執行“Yes-part” 指令。
ENDIF
IF < exp > THEN 符合<exp>條件,
“ Yes-part ” 執行“Yes-part”指令。
ELSE 不符合<exp>條件,
“ Not-part ” 執行“Not-part” 指令。
ENDIF
WHILE 循環至不滿足條件后,執行 END WHILE 以下指令。
WHILE reg1< 5 DO 循環至符合條件reg1> 5,
reg1:=reg1+1; 才執行ENDWHILE后指令。
ENDWHILE應 避免進入死循環。
其他常用指令:
:= 賦值指令。
ABB := 5;
ABB := reg1+reg3;
ABB := “ WELCOME ”;
ProcCall; 調用一個例行程序指令。
文章來源,
工業機器人維修官網:m.qhdjznet.com


 首頁 > ABB機器人維修 >
首頁 > ABB機器人維修 > 

